2025.12.10
養殖生け簀での水中ドローンを用いたへい死魚の回収
海と地球の科学技術コンサルタント
2025.09.01
令和5年度(2023年度)に引き続きまして、令和6年度(2024年度)以降の「水中ドローンによるウニ採取技術の開発」の取り組みについてご紹介したいと思います。しかし、その前に簡単に「水中ドローン」やこれまでの経緯を説明したいと思います。
「水中ドローン」は、水中を潜航可能な小型の無人潜水機(ROV: Remotely Operated Vehicle)の通称です。操縦者は陸上や船上からケーブルで繋がれた機体を遠隔操作し、リアルタイムで送られてくる水中映像を見ることができます。また、複数の推進器(スラスター)により、水中を自由に動き回り、ホバリングも可能です。弊社では、主にBlueRobotics社製BlueROV2PROを調査内容に応じて、カスタマイズを施して使用しています。
これまでの一般的な磯焼け対策として、漁業者やボランティアダイバーの潜水作業によるウニ駆除が行われてきました。しかしながら、駆除の範囲、活動時間、潜水深度、その頻度においてそれぞれ限界があり、また近年潜水士(ダイバー)の担い手不足や高齢化が進むと予想されることから、今後より安全で継続的かつ効率的な方法が求められると想像しております。弊社では、水中ドローンのメリットである「安全性の向上」、「水中での長時間作業」を活かして、効率的なウニ駆除、採取方法を開発検討しております。
ブログ記事「海洋ロボットを活用した地域社会の課題解決のための取り組み(その3)」で紹介したのは、スラープガン方式のムラサキウニの採取方法です。スラープガン方式の技術開発については一応の目途が付きましたが、吸引だけでは採取できない海底にしっかりと吸着したウニに対して、採取効率を上げるための改良と試験を行いました。

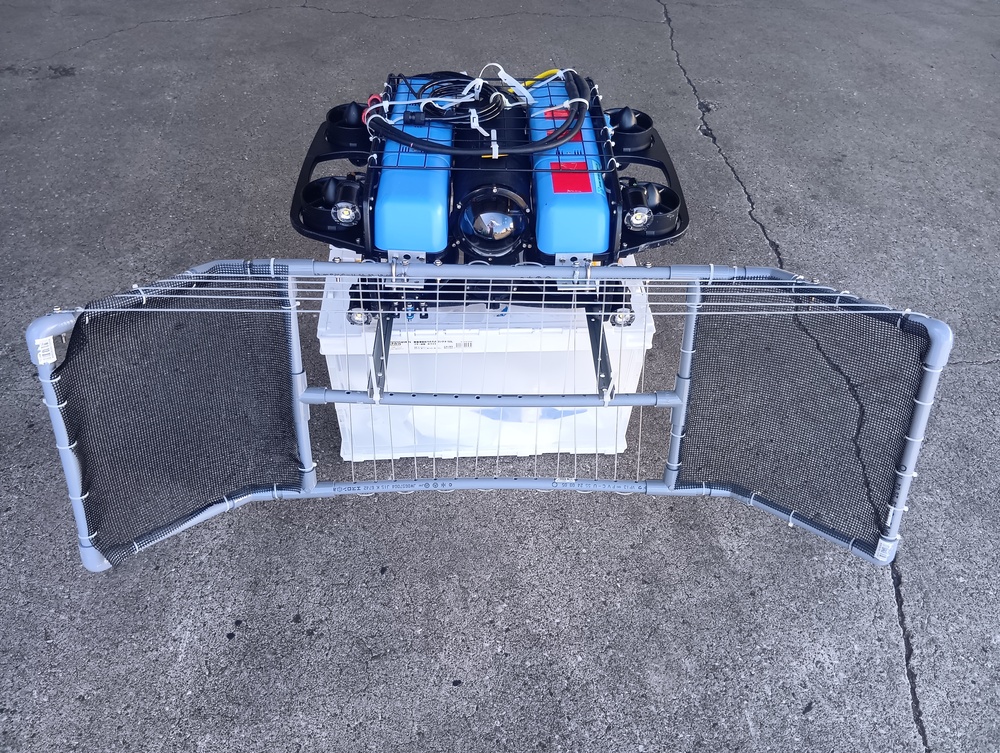
図1 一部改良したスラープガン方式
図1に示した画像は、スラープガンを左に、スクレーパーを右側に装備しています。海底に吸着するムラサキウニをスクレーパーで剥がし、その後、スラープガンで吸い取る方式にすることで、着実にウニを採取する方法としました。
次に、別の種類のウニの採取方法の検討です。弊社がお世話になっている神奈川県横須賀市の相模湾側の沿岸には、ガンガゼも生息しています。ガンガゼはウニの一種でその最大の特徴は長い棘(トゲ)を持つことです。殻の直径は5cm~9cmですが、トゲは長いもので30cmに達することがあるそうで、さらに棘の先に毒があり、刺されると激しい痛みが長時間続くそうです。ガンガゼは海藻を好んで食べるため、増えすぎると海藻を食べ尽くし、磯焼けを引き起こす要因の一つとされています。一般的に食用として利用されていませんが、磯焼け対策としての駆除対象生物になるので、その身を食用として活用する取り組みも行われているとのことです。
このようなガンガゼの採取方法ですが、棘が非常に長いことにより、スラープガンの吸引管のサイズでは吸引採取できないため、ロボットアームをカスタマイズして、ガンガゼを掴むような採取を検討しました。
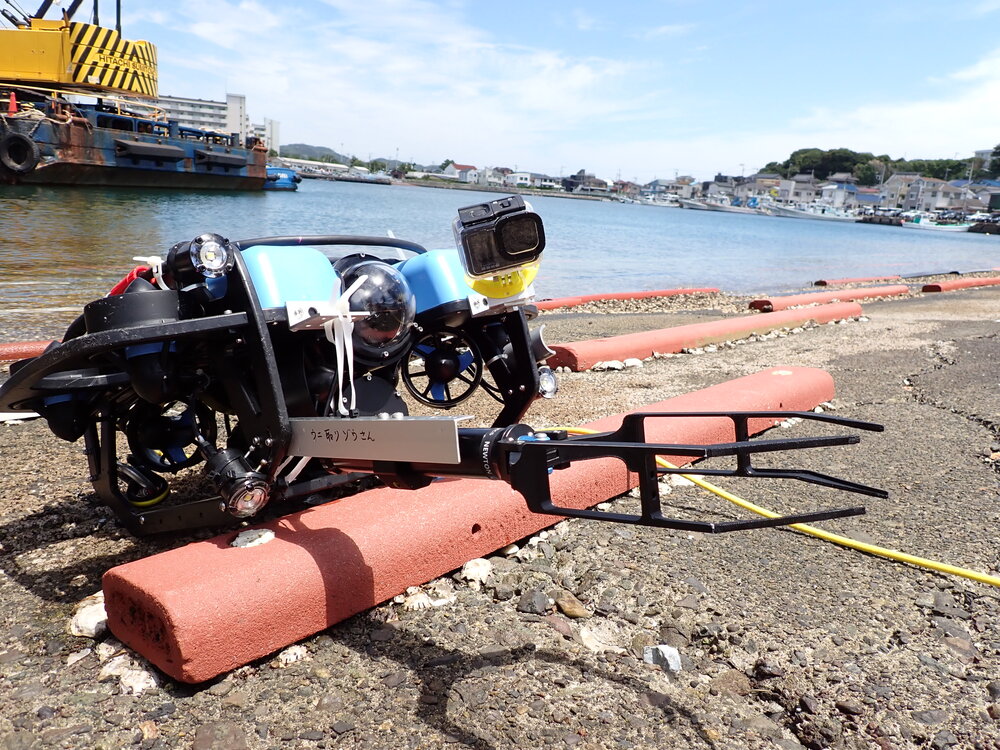
図3 ガンガゼ用の大きいサイズのプロトタイプのハンド部を取り付けた様子
沿岸域でガンガゼ採取試験を実施するに際し、ガンガゼ用にロボットアームの掴む部分を大きくしたプロトタイプを製作しました。図3にプロトタイプのハンドを取り付けた様子を示します。ハンド部が大きいことから、その先端が水中ドローンのカメラ部から遠くなり、操作者は距離感を掴むのが難しい感触でした。ウニに近づいて、ロボットハンドを開き、ウニを掴むためにさらに近づきロボットハンドを閉じることは簡単なようで難しく、結果的にウニ採取に時間がかかることになりました。また、樹脂製のハンドだったため、採取中に破損することもあり、サイズも含めて再度設計から見直すこととなりました。
ハンド部分について、ウニの掴みやすさと掴んだ後に取り落とさないこと、さらに頑丈さを念頭に金属製の三つ爪のハンド部を製作しました。図4にその様子を示します。
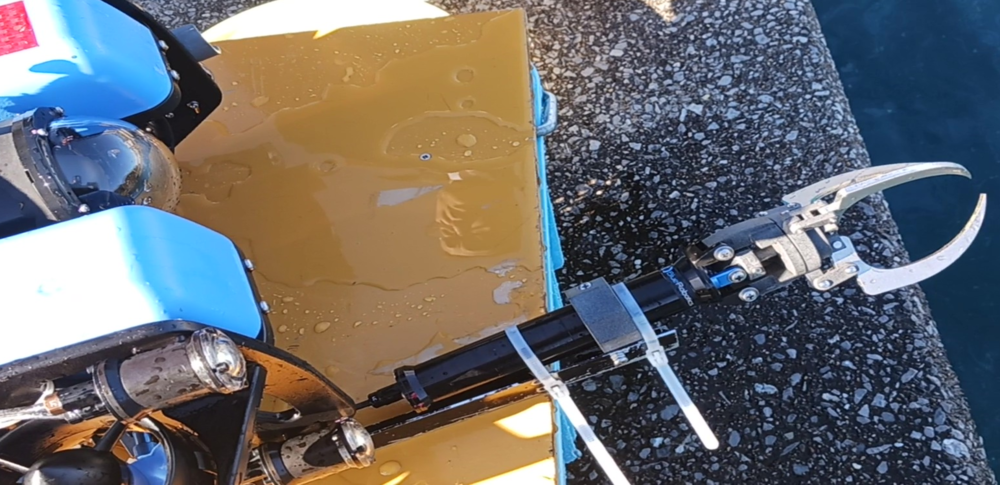
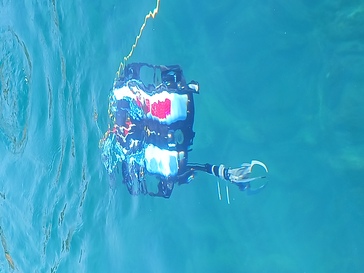
図4 三つ爪タイプのロボットアームと潜航の様子
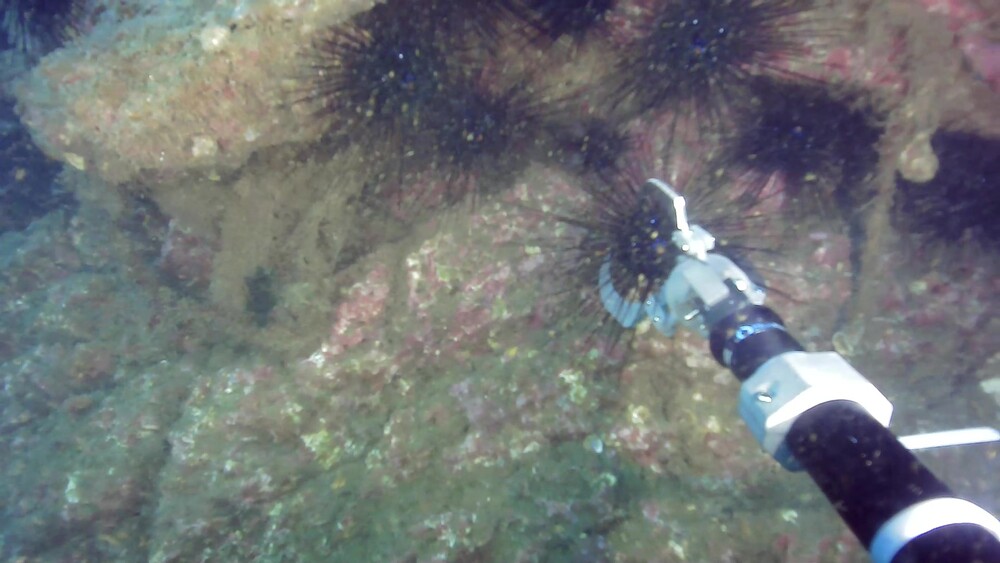
図5 三つ爪タイプのロボットアームでガンガゼを掴む様子
壁面に生息するガンガゼを三つ爪タイプのロボットアームで掴む様子を図5に示します。
まるでUFOキャッチャーのようですが、ガンガゼの棘の間に爪が入り、しっかりと掴めているわけではないのですが、ウニのトゲが支えとなり爪から落ちにくく、ガンガゼの採取に非常に有効でした。
また、ムラサキウニに対しても三つ爪タイプで採取を試みました。その様子を図6に示します。
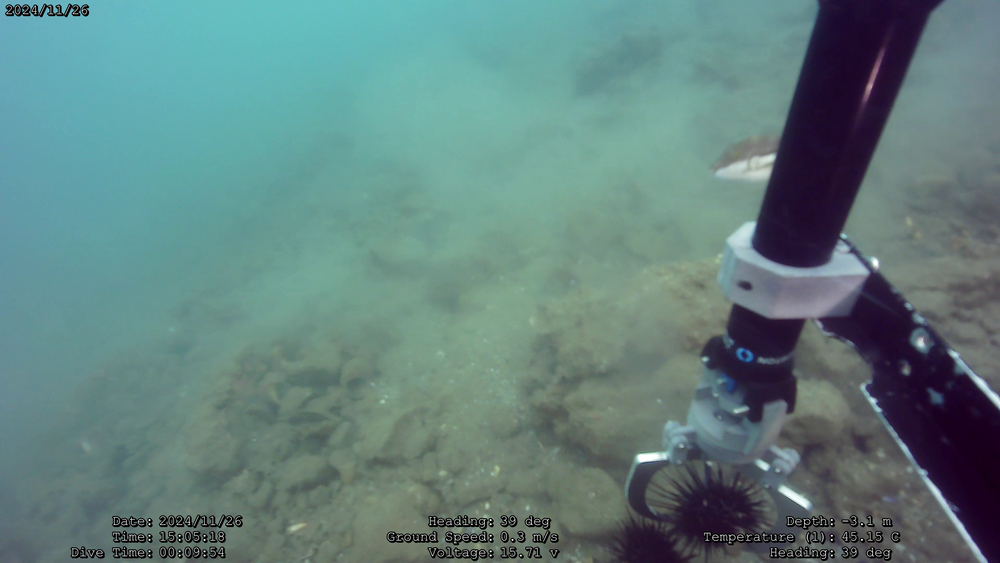
図6 ムラサキウニを三つ爪ロボットアームで採取する様子
ガンガゼの時と同様につかんだ後にウニの棘が支えとなり、落とすことなく採取することができました。三つ爪ロボットアームを使用する際には、水中でウニを保管するカゴを用意して、採取地点とカゴを往復することにより、効率的に採取作業を進めることが可能です。
これまでの検討結果からスラープガンタイプと三つ爪ロボットアームの二つの方法を開発することができ、状況に応じて2つの方法を使い分け、効率的にウニを採取する方法を開発することができました。