
 サービス・製品TOP
サービス・製品TOP
 海象モニタリング
海象モニタリング
 環境モニタリング
環境モニタリング
 海底地形・構造物調査
海底地形・構造物調査
 環境影響調査
環境影響調査
 観測ブイ設計・製作
観測ブイ設計・製作
 海洋調査・観測
海洋調査・観測
 試料分析
試料分析
 キュレーション
キュレーション
 ものづくり
ものづくり
 ソリューションTOP
ソリューションTOP
 洋上風力発電
洋上風力発電
 海底鉱物資源
海底鉱物資源
 海洋調査・試料分析
海洋調査・試料分析
 水産資源・ブルーカーボン
水産資源・ブルーカーボン
 会社案内TOP
会社案内TOP
 ご挨拶
ご挨拶
 理念体系
理念体系
 会社概要
会社概要
 沿革
沿革
~小型ASVを用いたウニ密度マップによる効率的な駆除方法の検討~(その1)
国土交通省が実施する海の次世代モビリティの我が国沿岸・離島地域における新たな利活用を推進する「令和3年度海の次世代モビリティの利活用に関する実証事業」につきまして、当社が提案した「小型ASVを用いたウニ密度マップによる効率的な駆除方法の検討」が2021年9月に採択されました。
海の次世代モビリティの利活用に関する実証事業
https://www.mlit.go.jp/sogoseisaku/ocean_policy/seamobijishou.html
本事業は国立大学法人東京海洋大学、長井町漁業協同組合、横須賀市とチームを組み、神奈川県横須賀市長井地先にて実証実験を開始しました。かつて長井地先にはカジメなどの海藻が広く繁茂しアワビなどの水揚げが多くありましたが、近年では海藻が消滅する磯焼けが見られ、その影響からかアワビなどは見られなくなってしまいました。長井地先の磯焼けの原因の一つにウニ個体数の急速な増加があります。長井町漁業協同組合と横須賀市では漁業者によるウニの駆除を続けていますが、潜水作業によるウニの駆除は根気のいる大変な作業です。

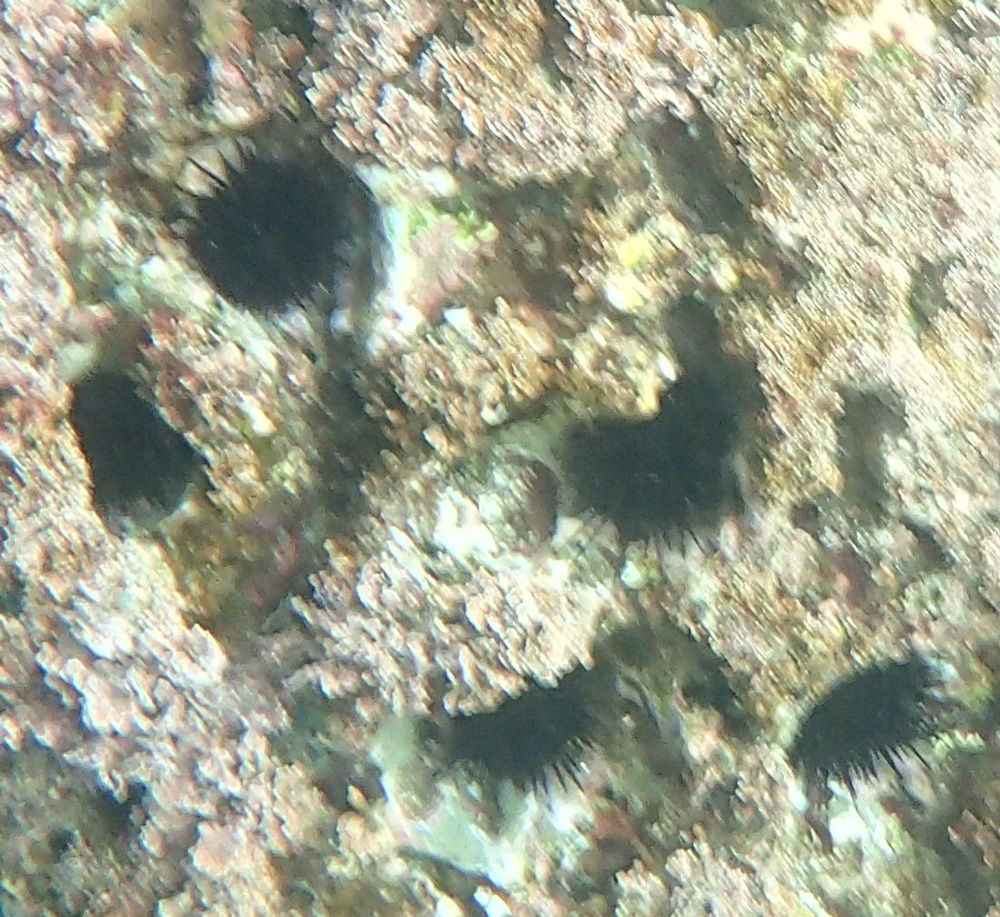
岩礁に生息するウニ
岩礁にくぼみを作りウニが生息している様子
そこで、本事業では小型ASV(小型無人ボート)を使用して、海底地形を計測するとともに水中カメラによる海底撮影とAIによる画像からのウニ自動検出を用いて、海底のウニ分布を把握することにより、ウニの密度マップを作成することに取り組みます。駆除作業を実施するにあたり事前にウニ分布状況が分かれば、密度が高い場所を選択して駆除を進めることができ、作業効率を高めることが期待できます。
本事業に使用する小型ASVは東京海洋大学田原淳一郎教授が開発した機体を使用します。この機体はサーフボードを利用しており、小型軽量であることが特徴で、どのような場所でも重機を使用することなく簡便にエントリーすることができます。

試験海域を自律航行する小型ASV
小型ASVの海面上には監視用カメラや通信装置、海面下には海底を観察するための水中カメラと測深装置、バッテリーが装備されています。小型ASVで取得したデータは4G回線を利用して陸上局に送られるシステムになっており、小型ASVを離れた場所から操作することができます。また、航行ルートをプログラムすることにより自律航行することが可能です。
本事業を通して小型ASVを社会実装し、地域の課題解決に役立てることをチーム一丸となって目指すこととし、2021年9月より活動を開始いたしました。(その2に続く)

自律航行しながら海底の映像取得や地形を調査する小型ASVの様子